Our industry-leading, high-speed industrial robots include high-payload, extended-reach, ultra-maneuverable seven-axis and unique 15-axis dual-arm robots.
Paketleme
Overview
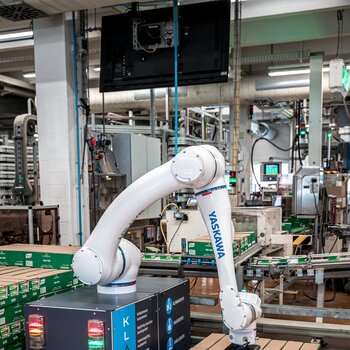
Paketleme Endüstrisinde Motoman Robotlar
Paketleme teknoloji güçlü ve güvenilir otomasyon bileşenlerine dayanır. Tesis operatörleri için, özellikle üretim zincirlerinin sonunda, plansız aksaklık süresi kabul edilemez.
Bu, torbalama ve blister ambalaj makinelerinin yanı sıra kartonlama makineleri veya her türlü form, doldurma ve mühürleme makineleri için de geçerlidir. Bu çeşit otomatik süreçlerin hassas şekilde çalışması için, kontrolörden robot teknolojisine kadar bağımsız öğelerin sorunsuz bir şekilde birlikte çalışması gerekir. Makine mühendisleri için tek bir üreticinin ürünlerine ve uzmanlığına güvenmek daha kolay, daha etkili ve daha düşük maliyetlidir.
Yaskawa, günümüzün güçlü hareket kontrolörleri ile hızlı ve kullanışlı makine çözümlerini mümkün kılmak için hatta paketleme sistemleri için tasarlanmış çok çeşitli robot çözümleri ile modern paketleme teknolojisi dünyasında uzun süredir güvenilir bir otomasyon partneri olarak kendini kanıtlamıştır.
Tüm Avrupa’da ve dünyada, özel ihtiyaçlarınız için mükemmel paketleme istasyonu veya hattını tasarlayacak ve inşa edecek Sistem Entegratörü deneyim ağımızla gurur duyuyoruz.
Broşürü İndirmek için Tıklayın
Motoman Robotlar ile Karton Katlama / Açma, Kasa Montajı
Karton katlama / açma için, robotlar klasik katlama / açma teçhizatı için çekici bir şekilde esnek alternatiflidir. Robot kasa montajı ve yerden tasarruf olarak paketleme prosedürünü birleştirebilir.
Motoman Robotlar ile Seç, Yerleştir ve Paketle
Paketleme Otomasyonundaki temel uygulamalar, Seç ve Yerleştir ve Seç ve Paketle'dir.
Motoman Robotlar ile Ürünleri Paketleme
Motoman Robotlar ile Paletleme
Etiketleme
MotoSim Çevrimdışı Simülasyon Mühendislik Aracı
Paletleme istasyonlarındaki düzenleme için, çalışma alanının bir benzerini yaratmak için MotoSim Yazılımı kullanmanızı öneririz. Burada; bileşenler optimum konumlara ayarlanır, robotun konveyör ve bant ortasındaki optimum konum bulunur, robot standının doğru yüksekliği bulunur, erişim ve erişilebilirlik testleri yapılır, istifleme modellerini ve istifleme yüksekliklerini kontrol edilir ve teçhizata geçmeden önce, çevrim hızı ve taban alanı gereksinimleri açısından eksiksiz ve uygun bir çalışma alanı elde edilebilir.